
Authors
- Authors

- Name
- Astar
- @bilibili
- 广度优先BFS、Dijstra、最佳优先BFS、A*四个最短路径算法简明解析,最后发现他们就像一个算法
目录
转自本人csdn
三种比较经典的最短路径算法Dijkstra、最佳优先、A*,他们本质上都由广度优先扩展而来,其实掌握广度优先算法也就掌握了这些寻路算法。
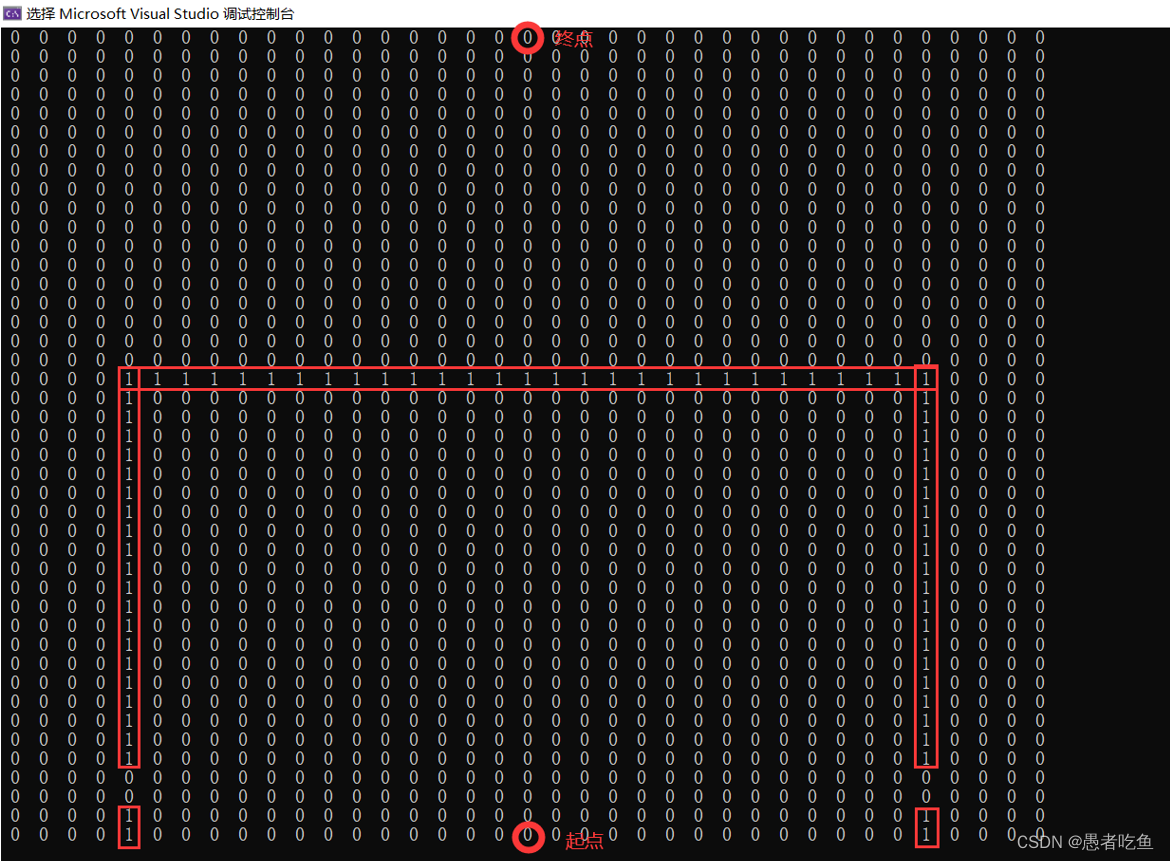
"游戏"的地图
寻路算法必须有地图,这里使用只包含0、1的矩阵表示游戏地图。 其中,“1”表示墙(不可访问),“0”表示可访问但尚未访问的地方
代码
//最短路径算法C++
const int map_width = 37; //地图宽度
const int map_height = 43; //地图高度
//相关数组
vector<vector<int>> game_map(map_height, vector<int>(map_width));//地图
game_map = {
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0}
};
一切的起点——广度优先
广度优先是最简单的寻路算法,也是本文剩余算法的基础,其本质是使用一个队列,按照移动的次数递增的顺寻遍历全图。 代码
//辅助内容
//移动方向以及代价
int add_x[8] = { -1,1,0,0,-1,-1,1,1 };
int add_y[8] = { 0,0,-1,1,-1,1,-1,1 };
double add_c[8] = { 1,1,1,1,1.414,1.414,1.414,1.414 };//代价
//辅助节点
struct node {
int x;
int y;
double total_cost;//广度优先用不到
double path_cost;//广度优先、Dijstra、最佳优先用不到
};
node begin = { map_height-1,map_width/2,0,0 };//起始节点
node target = { 0,map_width/2,0,0 };//目标节点
//打印函数
void print_map(vector<vector<int>>& game_map, vector<vector<double>>& gone_node, vector<vector<int>>& last_node, node& begin, node& target) {
//打印走的路径
game_map[begin.x][begin.y] = 2;
game_map[target.x][target.y] = 2;
int last = last_node[target.x][target.y];
while (last != -1) {
game_map[last / map_width][last % map_width] = 2;
last = last_node[last / map_width][last % map_width];
}
for (int i = 0; i < map_height; ++i) {
for (int j = 0; j < map_width; ++j) {
if (game_map[i][j] == 2)cout << " G ";
else if (gone_node[i][j] == DBL_MAX)cout << " 0 ";
else if (game_map[i][j] == 1)cout << " 1 ";
else cout << " * ";
}
cout << endl;
}
}
//广度优先
bool bfs(vector<vector<int>>& game_map,node& begin, node& target) {
queue<node> qu;//目前可去节点
vector<vector<double>> gone_node(map_height, vector<double>(map_width, DBL_MAX));//到达过的节点
vector<vector<int>> last_node(map_height, vector<int>(map_width,-1));//到达此节点的上一个节点
qu.push(begin);
//标记起点已经走过
gone_node[begin.x][begin.y] = 1;
while (!qu.empty()) {
node current = qu.front();
qu.pop();
//走到目标直接返回true
if (current.x == target.x && current.y == target.y) {
print_map(game_map,gone_node,last_node,begin,target);
return true;
}
//将八个方向的坐标插入队列
for (int i = 0; i < 8; ++i) {
int xx = current.x + add_x[i];
int yy = current.y + add_y[i];
if (xx < 0 ||//走到边界的情况直接略过
xx >= map_height ||
yy < 0 ||
yy >= map_width ||
game_map[xx][yy] == 1||//到墙前面的情况直接略过
gone_node[xx][yy] == 1//走过的节点直接略过
)continue;
qu.push({ xx,yy });
gone_node[xx][yy] = 1;//标记当前的路已经走过
last_node[xx][yy] = current.x * map_width + current.y;
}
}
return false;
}
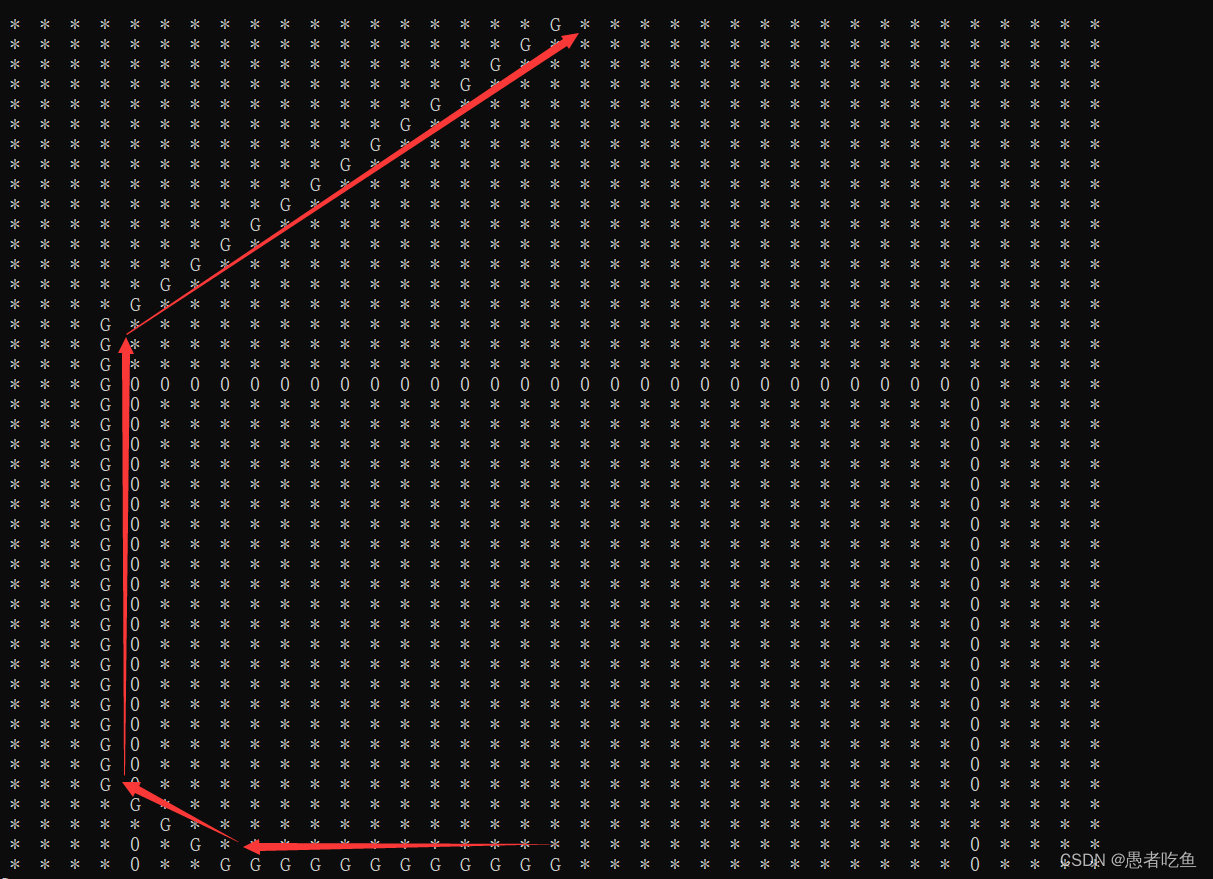
地图中元素的含义:
- 0:墙或者没走过的节点
- *:广度优先算法探索过的地方
- G:最终的路径
分析: 可以发现,广度优先得到的结果是最优的,这是为什么呢? 实际上,在当前地图上广度优先和Dijstra效果是一样的,原因下面解释。
Dijstra算法
非常经典的算法,其本质是在广度优先基础上,以已经走过的距离为标准,以一定顺序遍历全图。
对于广度优先来说,遍历某个节点的时候,需要把与它相连的节点全部送入队列末尾,而Dijstra不同,节点在队列中的顺序是按照其已经走过的距离排列的。
也就是说,把广度优先中的队列改成按照已经走过的距离排序的优先级队列就ok了。
于是,Dijstra算法便呼之欲出了
代码
//与广度优先使用相同的辅助内容、移动方向以及代价、辅助节点和打印函数
//用于C++优先级队列中元素的比较
class Compare {
public:
bool operator()(node& left, node& right) {
return left.total_cost > right.total_cost;
}
};
//Dijkstra
bool dijkstra(vector<vector<int>>& game_map,node& begin, node& target) {
priority_queue<node,vector<node>, Compare> qu;//目前可去节点 ①换成了优先级队列
vector<vector<double>> gone_node(map_height, vector<double>(map_width, DBL_MAX));//到达过的节点
vector<vector<int>> last_node(map_height, vector<int>(map_width, -1));//到达此节点的上一个节点
qu.push(begin);
//标记起点已经走过
gone_node[begin.x][begin.y] = 1;
while (!qu.empty()) {
node current = qu.top();
qu.pop();
//走到目标直接返回true
if (current.x == target.x && current.y == target.y) {
print_map(game_map, gone_node, last_node, begin, target);
return true;
}
//将八个方向的坐标插入队列
for (int i = 0; i < 8; ++i) {
int xx = current.x + add_x[i];
int yy = current.y + add_y[i];
/*走到边界的情况直接略过
* 走到墙前面的情况直接略过
* 走回头路(刚刚走过的路)的情况直接略过
*/
double cost = current.total_cost + add_c[i]; //②需要计算已经走过的距离
if (xx < 0 ||//走到边界的情况直接略过
xx >= map_height ||
yy < 0 ||
yy >= map_width ||
game_map[xx][yy] == 1 ||//到墙前面的情况直接略过
gone_node[xx][yy] == 1//走过的节点直接略过
)continue;
qu.push({ xx,yy,cost });//③插入队列的时候加上已经走过的距离
//标记当前的路已经走过
gone_node[xx][yy] = 1;
last_node[xx][yy] = current.x * map_width + current.y;
}
}
return false;
}
抛开新定义的Compare ,只改动了三处,便从广度优先转变成Dijstra算法了。

解释 对于地图上的四个点:
A B C D
由前面代码可知AB、AC、DC...之间的距离是1,AD和CB之间的记录是1.414。
- 对于Dijstra:距离派上了用处,AB、AC、DC…之间的距离是1,AD和CB之间的记录是1.414,因此Dijstra的结果是包含最少移动距离的路径。
- 对于广度优先:距离是用不上的,ABCD任意两个点之间的距离都视作1,因此广度优先的结果是包含最少移动次数的路径。
- 不难发现,在上述地图上,对于两种算法,走对角(从A到D,走一个节点)代价总是比走拐角(从A到B再到D,走两个姐点)的代价低,所以他们的结果一致。真实的地图上,多个节点连成的路也许比两个节点直连的路代价更小,这时才能体现出Dijstra以及其他寻路算法的优越性。
最佳优先算法BFS
最佳优先(Best First Search)缩写也叫BFS,而它与广度优先也很相似,其本质是在广度优先基础上,以启发式估算的距离为标准,以一定顺序遍历全图。
启发式又称估价函数,它的作用是对将要遍历的节点进行估价,在本文中,我们使用欧几里得距离进行估价。
好了,上代码
代码
//与Dijstra使用相同的辅助内容、移动方向以及代价、辅助节点和打印函数、Compare类
bool bestfirst(vector<vector<int>>& game_map, node& begin, node& target) {
priority_queue<node, vector<node>, Compare> qu;//目前可去节点
vector<vector<double>> gone_node(map_height, vector<double>(map_width, DBL_MAX));//到达过的节点
vector<vector<int>> last_node(map_height, vector<int>(map_width, -1));//到达此节点的上一个节点
qu.push(begin);
gone_node[begin.x][begin.y] = begin.total_cost; //①初始代价
while (!qu.empty()) {
node current = qu.top();
qu.pop();
//走到目标直接返回true
if (current.x == target.x && current.y == target.y) {
print_map(game_map, gone_node, last_node, begin, target);
return true;
}
//将八个方向的坐标插入队列
for (int i = 0; i < 8; ++i) {
int xx = current.x + add_x[i];
int yy = current.y + add_y[i];
double cost = sqrt(pow((double)xx - target.x, 2) + pow((double)yy - target.y, 2));//② 计算启发式
if (xx < 0 ||//走到边界的情况直接略过
xx >= map_height ||
yy < 0 ||
yy >= map_width ||
game_map[xx][yy] == 1 ||//到墙前面的情况直接略过
gone_node[xx][yy] <= cost//③当前路径代价更小才走
)continue;
qu.push({ xx,yy,cost });
gone_node[xx][yy] = cost;//④更新节点代价
last_node[xx][yy] = current.x * map_width + current.y;
}
}
return false;
}
相对于Dijstra,改动了四处,Dijstra保证每一步找出的节点都是距离最优的,而最佳优先没有这个保证,它甚至不一定能找出最优路线......
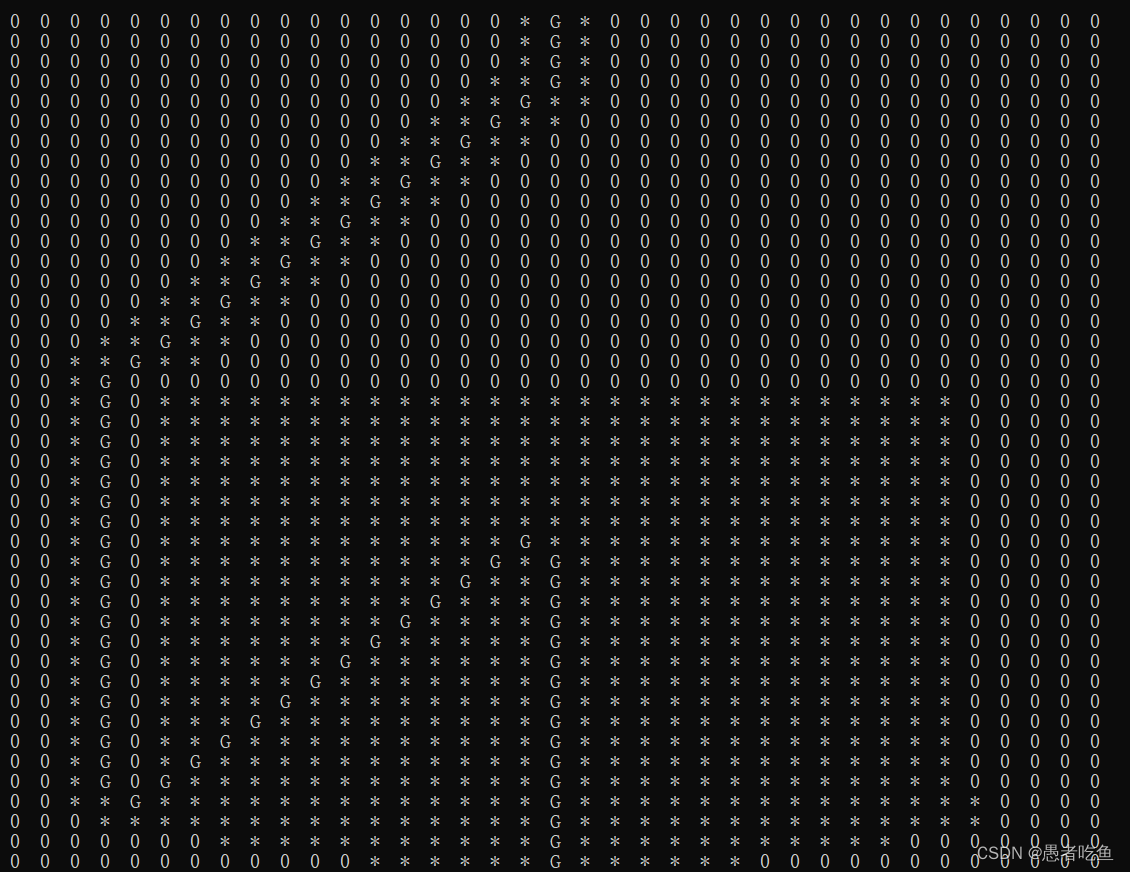
- 0:墙或者没走过的节点
- *:广度优先算法探索过的地方
- G:最终的路径
可以发现,最佳优先经过的无关节点更少了,找到单条路径效率更高了,然而该路径并不是最优的(事实上,寻找一个节点到其他所有节点的最短路径还得看Dijstra)
A*
最后是A*算法,它把Dijstra算法和最佳优先算法结合到了一起,在广度优先的基础上,同时考虑已经走过的距离和启发式函数,以一定顺序遍历全图。
代码
//与Dijstra使用相同的辅助内容、移动方向以及代价、辅助节点和打印函数、Compare类
//A*
bool AStar(vector<vector<int>>& game_map, node& begin, node& target) {
priority_queue<node, vector<node>, Compare> qu;//目前可去节点
vector<vector<double>> gone_node(map_height, vector<double>(map_width, DBL_MAX));//到达过的节点
vector<vector<int>> last_node(map_height, vector<int>(map_width, -1));//到达此节点的上一个节点
qu.push(begin);
//标记起点已经走过
gone_node[begin.x][begin.y] = 0;
while (!qu.empty()) {
node current = qu.top();
qu.pop();
//走到目标直接返回true
if (current.x == target.x && current.y == target.y) {
print_map(game_map, gone_node, last_node, begin, target);
return true;
}
//将八个方向的坐标插入队列
for (int i = 0; i < 8; ++i) {
int xx = current.x + add_x[i];
int yy = current.y + add_y[i];
double cost = sqrt(pow((double)xx - target.x, 2) + pow((double)yy - target.y, 2)) + current.path_cost+add_c[i];//①同时考虑已经走过的距离和启发式函数
if (xx < 0 ||//走到边界的情况直接略过
xx >= map_height ||
yy < 0 ||
yy >= map_width ||
game_map[xx][yy] == 1 ||//到墙前面的情况直接略过
gone_node[xx][yy] <= cost//当前路径代价更小才走
)continue;
qu.push({ xx,yy,cost, current.path_cost + add_c[i] });
//标记当前的路已经走过
gone_node[xx][yy] = cost;
last_node[xx][yy] = current.x * map_width + current.y;
}
}
return false;
}
相对于最佳优先算法只改了一处......
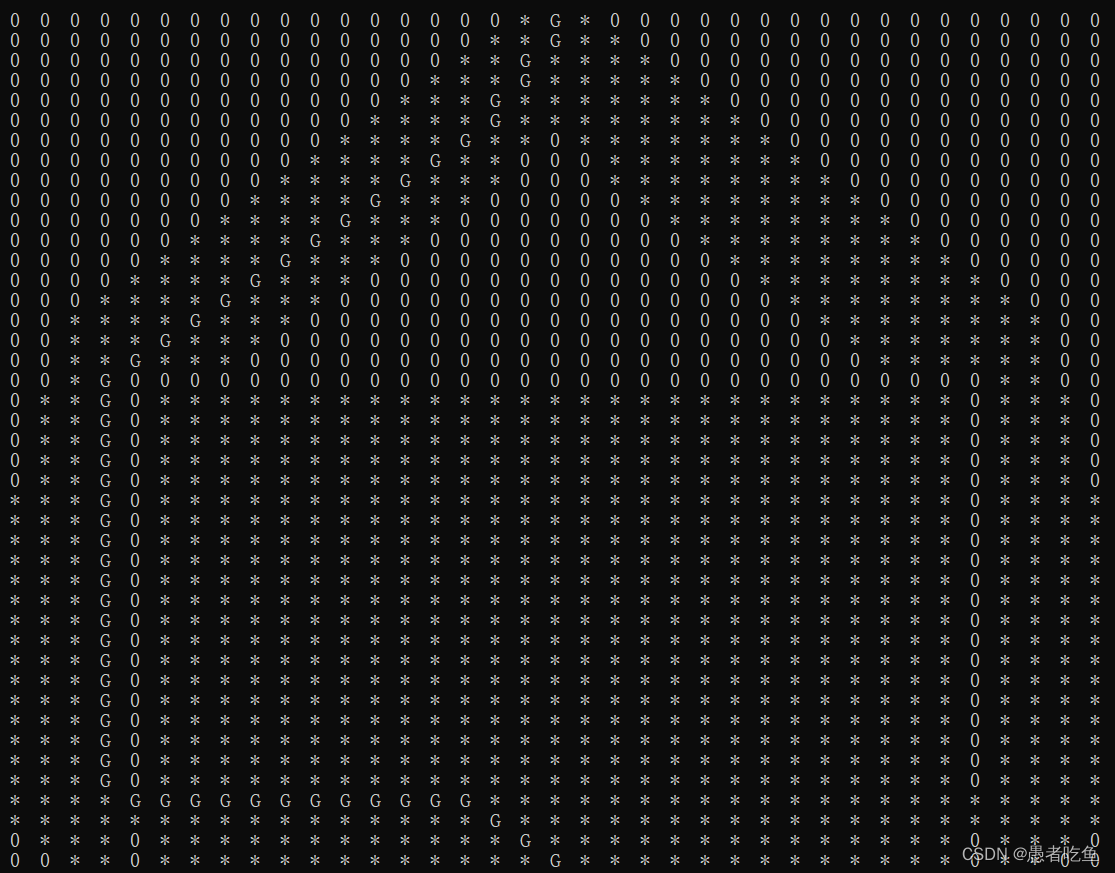
从结果上来看,确实综合了Dijstra的好处和最佳优先的好处。